| 2022.01 |
屋外テスト
まもなくスタート |
手を挙げていただいた先があり、間もなくフィールド(実践の場)で稼働テストのスタートができそうです
まずは、映像取得からスタートし、その後忌避手段を装備し、実証実験を開始です
少々長期戦になるのではないかと想定しています |
| 2022.03 |
実稼働テスト
開始 |
左下、白い壁の上にカメラ部が見えます
この範囲に加え、もっと右方向にもカメラを振りながら検知・判定する対象を探します
検知して目的の対象と判定すれば、そのものを追います
現地 検知、判定、制御(追尾)・録画処理 + 遠隔録画&制御(調整)
携帯網接続ルーター使用

現時点では、忌避用(追い払い用)器具は取り付けていません |
| |
|
|
| 2022.03 |
夜間捕捉成功
タヌキ
実験開始6日後 |
実証実験を開始してから1週間、夜間の捕捉に成功しました
最初の捕捉は、予想どおりタヌキでした
早速、場所をお借りした先に報告しなくては・・・
検知カメラがパンしながら対象を探します
対象を捕捉識別後、その対象が中心に映るように捕捉した相手を追尾します
忌避道具を連携させることを前提としています
目的とした対象ではないと識別されれば、検知カメラはパンを継続します
以下の映像は、対象物を検知し識別した時点でmail添付されてくるスナップです
いわゆる監視ポストであれば、この機能まででOKかと思われます
獣害対策に向けては、対象に対して有効な忌避具を使用して追い払うことになります
 |
|
夜間捕捉成功2
タヌキ
実験開始11日後 |
 |
| |
夜間捕捉成功3
イノシシ
実験開始12日後
|

映像が多く取得できるほどAI学習し、より精度が向上します |
| 2022.04 |
サルの捕捉に成功
山を下りる時期と
なりました |
 |
| |
|

獣道を歩いているところで検知識別できています
検知カメラからは50m以上離れたところを通っています |
| 2022.08 |
装置を移設
シカの画像データ
取得は十分に
|
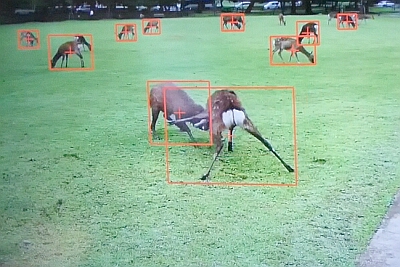
ことシカに至っては、3週間で1800回を超える検出が出来、AI学習には十分と思われるデータの取得が出来ました
イノシシに関しては、まだまだ数が増えません
どうも、暗視の赤外線発光/赤外線サーチライトを嫌って、出てこないように見受けられます

上写真の四角の枠は、対象を識別したというマークです
本装置は常に首を振って、対象を探します
対象を識別すると、今度はその対象の動きを追う動作をします
すなわち、赤外線投光器はその検出装置の動きと一緒に動くことになります
上写真のように、50m先でも十分映るそれなりのパワーがあるものです
シカは赤外線を嫌がらないというお話はよく耳にしますし、実際しっかり映っています
一方、イノシシは「赤色(赤外線)」は見えないというお話はありますが、上写真のようにサーチライトよろしく「明かり」が動いていることについては、少なくとも意識をしていることに間違いなさそうです
本装置の実証実験の中から偶然見つけた事象です
 |
柱(支)は、高さ2750mmのものを使用しています
いわば標準柱!? |
この場所では、シカの1割程度は出没すると事前にお聞きしていたイノシシですが、実際に本装置で検出できたのは、シカの1800回を超える検出に対して僅か7回でした(それも同じ2頭) |
| |
独立電源モデル |
検出機会が多いということもあって、上記近隣に2台目を設置しました
こちらは、ご覧のように独立電源タイプです
 |
| 2023.01 |
AI画像識別 |
 |
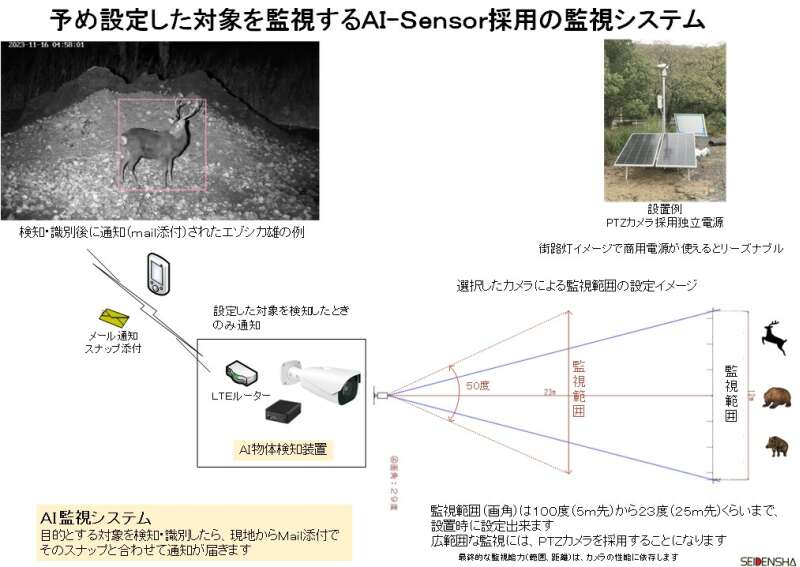
ティンバーテック 本田社長のご協力を得て、撮って送っていただいたエゾシカ・ヒグマの映像を学習させています
まず送っていただいた動画を大型ディスプレイに写して、AI識別を試してみたところ、エゾシカのメスについては、従来のニホンシカの学習結果で、そこそこ「シカ」と識別します
が、エゾシカのオスは「シカ」と識別しません(やはり立派な角のせいでしょう)
識別能力は高いといえます |
| 2023.04 |
新たな目標に |
シカ・イノシシのAI学習を目的に、映像取得のために設置していた先の許可が出ましたので、忌避手段を持つ装置と入替を行います
AI画像識別には十二分な映像データを得ることが出来ました
次の段階としては、忌避手段の効果の検証を目的に、です
頻繁に野生が現れる場所ということで選んだ場所なのですが、何をするにも管理者の許可を得る必要があるところです
関係して、このAI学習を目的にした装置を回収・メンテして、次なるターゲットの映像取得を目的に新たな設置を行う段取りを進めています |
| 2023.05 |
忌避具装着ほか |
実証試験運用の充実を進めています
忌避具を装備した本来の?獣害対策ロボットをすでに回収したAI学習用の装置に代わり設置を行います
既に回収したAI学習用の装置一式は、新たなターゲット・・・エゾシカですが、こちらの映像取得に向けて移設の段取りを進めています
ちょっと時期が良くなく(遅くなって)、半年ほど開店休業になるかもという不安はありますが、十分な映像データが得られるまで待って、忌避具の装着を行う段取りでいます
最近出没情報がやたら多いと感じるヒグマについては、AI学習用の映像データの入手に向けて努めています
映像データは多いほど正確にAI識別しますので、収集に努力します
エゾシカのように、装置を設置して映像を得る・・・電源事情ほかヒグマの撮影には色々困難が伴うことが明白ですので・・・ |
| 2023.06 |
エゾシカ狙い
稼働開始
|
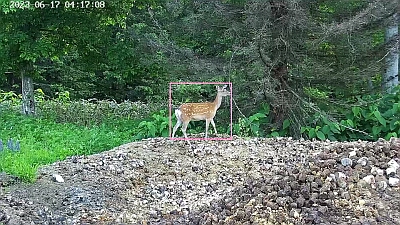
AI学習目的に映像取得のための装置を設置
下写真は撮影範囲の一部を切り取ったもの

エゾシカ狙いで、北海道下川町にAI学習映像取得のための装置を設置し、運用を開始しました
少々タイミングが遅く、ご覧のように雪はなくなり緑が茂ってきました
しばらく出没は期待できないかもしれませんが、稼働を続けます
1年間稼働させるといろんな事象も起こってくるでしょう、これぞフィールド試験です
 |
| 春先に対象を捉えること(撮影)ができた場所です |
 |
|
設置・運用のご協力をいただいた下川町農林課、ティンバーテックほか関係諸氏に感謝いたします |
| 2023.06 |
対象を捕捉 |
 |
赤外線投光は平気 |
 |
枠は識別を意味 |
 |
早朝明るい時も出現 |
今回の設置時期は、現れるタイミングを外したか、と思ったのですが、なんと早速来場です
いい意味で、予想が外れました
来場は、夜間中心ではありますが、大胆にも?16時ごろから午前中お昼頃まで現れています
子どもを連れた母ジカも映っていて、餌場として定着している感があります
秋以降オスジカが、ハーレムを形成して群れでやってくる可能性に期待が持てます
設置8日で、30回程度の来場があり画像が得られまして、その学習から「枠」にあるように識別が出来ています
これら多くの映像をAI学習させて、より識別能力の向上を目指し、その後忌避手段を増設(装置入替)します |
| |
|
 |
下川町設置の様子
手
前を監視 |
|
カメラは、PTZ動作
暗視で60m先の対象識別が可能な投光器をセット
ここに、忌避具をセットすることも可能(現在は、AI画像学習専用) |
| 実際の映像はページ上部でご紹介 |
|
|
|
 |
黄色線の右1
8
0度を監視 |
|
出没する方向、おおよそ180度を監視対象にしています |
|
| 2023.06 |
忌避装置
稼働開始 |
岡山県内に設置していたAI学習用装置を忌避装置を装着した装置に交換しました
管理者の許可が出ましたので、まもなく稼働を開始します |
| 2023.07 |
忌避行為の実証 |
まず、パラメトリックスピーカーによる「音」による威嚇です
短いですが、映像で紹介します
ターゲットを狙った威嚇ということで、単純な音出しとは様子が異なることを実証です

映像紹介(別ページが開きます) |
|
| 2023.08 |
珍客? |
タヌキに続き、キタキツネも識別・記録が何度かあります
残るは(欲しいのは)、エゾシカのオスとヒグマの実映像・・・です
赤外線投光器がサーチし、識別時は対象を照らして動きを停止していますから、一度はカメラ目線をします
このタイミングで忌避行為を行えば、自分が対象にされていることを即理解します
必死でそこから逃げることになります(上でご紹介の短い映像参照)
こちらの装置は、AI学習用のもので、忌避手段は持っていません(持たせていません)
従いまして、一度カメラ目線をして、何も起きないことを確認して草食を続けてるというのが現状です |
| 2023.10 |
成獣のオスジカを
捕捉 |
 |
オスジカは、秋になるとハーレムを形成して現れると、事前に教わった通り、この時節になって初めて成獣のオスを捉えました
但し識別はオシリで、で
録画映像から、立派な角をもったオスジカの識別ができるようAI学習させます
映像取得を重ねることで、識別精度の向上を目指します |
学習が進みました
 |
あくまで感覚でですが、近くにヒグマがいると思われる時には、出没がありません
現地から、ヒグマを捉えていないかという照会がある時には、必ずそういう状況になっています
この場所独特の現象かも知れませんが・・・ |
|
| 2023.11 |
リアルタイム
監視通報システム |
悪意をもって装置に近づく人であっても、その人に危害を加えることがあってはならない・・・こうした考えで選ぶ忌避手段では、野生に対峙はできない・・・野生を学習させることなくいつまでも追えるはずはないと、こちらが学習しました
獣害対策においては、少しの痛みを感じさせられるくらいの忌避手段は必須と考えるところで、この手のお話しが出ると少々こちらのテンションが下がります
それでもって、良い忌避手段は無いかって聞かれても・・・猟友会の方に、銃を持って24時間365日そこに立ってもらって等と申し上げても、実現不可能でしょう
その銃ですが、当初から意識していた電動ガン(バイオBB弾銃)に続き、水やら香辛料のようなものを強力に発射できるものについても、引き金が引ける工夫を進めています
その一方で、アプローチ先を少し見直して、「無人監視」を大きなテーマとすることにしました
もちろん、忌避装置をセットすれば、獣害対策ロボットそのものです
一言で表せば、監視の無人化、です
今年の冬で言えば、クマが一番の監視対象かも知れません
監視対象は、AI学習させれば人(個人)であっても、工業生産物であってもOKです |
| 2023.12 |
対(耐)低温動作 |
本機は、もちろん屋外仕様です
現地は、ここのところの寒波襲来で、最低気温が−20℃近くまで下がるような状況ですが、問題なく動作しています |
| 2024.01 |
改めて
忌避行為について |
まず、単純な忌避行為については、相手が学習して、その効果が長く続きません
いわゆる慣れ・・・です、敵もさるものです
このことについては、おおよその関係者が経験済みのことでしょう
効果が大きいと見込まれる忌避行為については、一般にその実施には多くの労力がかかります
実施する忌避行為そのものについて、住民への理解を得ることが必要で、実施には多くの労力が必要となるケースが多く、難しい問題の一つだと思われます
期間を決めて、この間は、この実施エリアに近づかない、くらいの周知徹底が必要になるのかもしれません
本当に、地域を守ろうとするなら、一度きりではなく、対象が本当に出没をあきらめるまで、何度も実施する必要があるとも考えられます
相手も命がかかっていますから、それくらい獣害対策は大変なことだと言うことになります
本当(本来)の獣害対策とは、使った費用(労力)について、短期間に綺麗な報告書が書けるような内容ではないということです
人間サイドも、泥臭い、そしてしぶとい対応が必要だということに他なりません
これが、なかなか出来ないのが現代社会? いつまでも繰り返しの獣害対策が続きます |
| 2024.01 |
エゾシカ |
北海道下川町に設置の装置
6000ショットを超える検出映像を得ることができました
映像学習については、十分出来たものと判断しています
ヒグマが捉えられないか期待をするも、残念ながらここまでに検出はありません(近くでは出没があるように聞いています)
現地と相談ではあるのですが、忌避を目的とする装置を追加(実際は装置の入れ替え)することを考えたいと思います |
| |
捕獲作戦を優先 |

その下川町ですが、エゾシカの大量捕獲を目指して囲い罠の設置が予定されており、本装置への忌避具の装着(装置の入れ替え)は、この動きが一段落した後になります
その囲い罠ですが、現時点で、十数頭まとまって現れることもしばしば見受けられるこの場所の近くに、設置されるそうです
本装置を使っての忌避手段の実行は、3月下旬以降になりますが、対象をエゾシカにするかヒグマにするか、春先を狙うか、秋口を狙うか、設置場所を引っ越すかどうか、忌避手段は何を採用するかなどは、これからの打ち合わせです |
| |
近況(状況) |
過去の映像から、この場でのお食事時間(滞在時間)は、30分〜 |
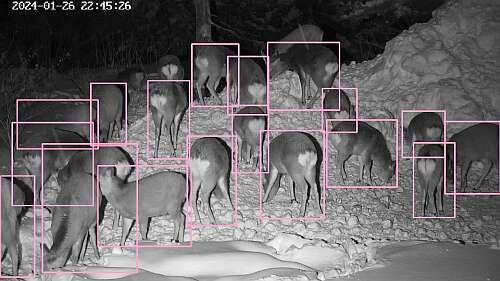
1フレームに、過去最大の19頭を捉えています
メスジカと、その子どもたちだと思われます
オスジカは、子どもも含めこの中には見当たりません |

ここまでに最大4頭のオスジカが同時に出現しています |
3頭のオスが同時に出現
親子?兄弟?
縄張り争いをしない?
食べ物に不足がない? |

より大きな追い払い効果を得る、あるいはその効果を持続するために、この映像のタイミングで、あるいは動きに追従して忌避行為が行える仕組みづくりを行っています(特許取得済)
自分がターゲットにされていること・・・自分に危険が及ぶ可能性が高い状況にあることを、より強く実感させることを目的にしています
PTZカメラの採用で、対象を識別後、このように画面中央で捕捉し、常に画面中央で捕捉できるよう、その後の動きに追従します
大型のPTZカメラを使用し、このものに取り付け連動する忌避具で、あとはタイミングを見てトリガを引くだけです
忌避手段に何が適しているのかが、いわば最後の選択です
対象を識別しますので、追い払い効果を高めるために、同一の装置から、識別した対象によって異なる忌避手段の実行も出来ます
もちろん、人間は忌避行為の対象として認識しません |
カメラ連動の赤外線投光器が、自分に向けば、必ずこのようにカメラ目線をします(警戒行動をとる)
このタイミングで、効果的な威嚇をしたい! |
|
| 2024.04 |
行動に変化 |
昨年6月の設置から、エゾシカの検出&そのショット数は11,000を超えました
積雪もほとんどなくなり、春の息吹を受けて、4月の中旬を前に、この地への出没数が大きく減少しました
彼らの行動パターンが、冬モードから変わったようです |
| 2024.06 |
忌避行為を追加 |
AI画像学習用に設置していた「装置」ですが、移設して忌避行為を行うよう(本来の「獣害対策ロボット」となるよう)装置の入れ替えを行うことになりました
新しい設置場所は、商用電源が使えず、ソーラーパネルを採用した独立電源を採用
忌避手段としては、パラメトリックスピーカーと、レーザーを搭載の予定で、7月中旬稼働をめどに用意を進めています
忌避手段については、手段を変更しながら効果の検証を進めます
この場所では、ヒグマの目撃情報もあるようです |
| 2024.06 |
活躍の場 |
人が暮らしているところでは、思い切った忌避手段は採用してもらえません
悪意を持った人が現れたとしても、事故は困る・・・と
ある意味、優しい忌避手段の採用で、実際の野生に対する効能に関しては不安というか不十分というか・・・
今盛んに将来の普及に向けて報じられている海上風力発電設備の設置・・・この設置環境であれば、思い切った手段の採用も出来そうです
そうです、日本が世界から立ち遅れていると指摘されている、バード・ストライク問題への対応です |
| 2024.07 |
実戦配備へ |
人に危害を与えるような威嚇手段は持たせませんが、念のため画角内に人を検知・識別した場合は、威嚇行為を実行しないように設定したもので用意しました |
| 2024.11 |
撤収、出展 |
冬が始まる前に装置を撤収、実証実験も終了です
本体は、東京ビッグサイトに送って『アグリビジネス創出フェア2024』出展です
130日間の実証実験の様子は、実証実験のページでご紹介しています |
|
現在の獣害対策のメインは、捕獲それも効率良く大量捕獲を目指しているようです
ドローンの普及を目指している国策?に沿って、ドローンで野生動物を大型の捕獲罠に追い込むようなことも行われているようです(実証実験?)
ここまで野生動物が増えると、こう考えざるを得ない(人間都合ですが)事態発生状況かと思われます
こちらで取り組んでいる「獣害対策ロボット」は、その先を見越しています
環境省が取り組んでいる野生動物の保護管理計画、その適正数になるよう捕獲などが進み、その先のいわゆる人の生活圏を守るというか、野生動物が想定した野生の生活圏から人の生活圏に出てこないように監視する、その役割がこの「獣害対策ロボット」で担えるのではないかと考えています
人の生活圏に出てきて餌場として学習した野生動物を頑張って捕獲(駆逐)しても100%はありませんから、その後を放置すれば、また次の野生動物が人の生活圏に入り込み、数を増やし、結果また捕獲に努めないといけないという繰り返しとなります
生活圏の棲み分けが実現すれば、まさしく人と野生動物の共存です
野生動物は、得られるエネルギーの範囲でしか数は増えません
線引きが出来れば、人の耕作物により多くのエネルギーを得ている現状から、自然のエネルギーの範囲での繁殖となります
生活圏の線引きこそが、最終的な獣害対策です(このように考えます)
その昔は、そこに住む人の手で出来ていた生活圏の線引きですが、人口減ほかの事由で今の時代では出来なくなったことが結果として野生動物を増やしていることにつながっています
この生活圏の線引きを「獣害対策ロボット」が担ってくれると考えています
キーワードは『ゾーニング zoning』、人と野生動物の生活圏の線引き/棲み分けです
こちらで提案する「獣害対策ロボット」は、このゾーニングの補助具です! |
| 以下、製品化に向けた試行錯誤の中からご紹介 |
製品化において、価格がその一番の鍵であることは承知しております
本装置の場合、センサとなるカメラに対してその能力に期待が大きければ、結果高額になります
より遠くで、昼夜問わず野生動物を識別したい また頑強な構造が望ましい
となると、初回モデルのような防爆仕様で大型化したカメラの採用となります
低コストを目指せば、PTZではなく固定のカメラを採用、あるいは忌避手段をカメラ連動ではなく、他の構造のものを別に用意するなど、方策は考えられます
獣害対策(生活圏の線引き))という目的に対して、ハイスペックなカメラを採用することで、悪環境にも耐え、人以上の識別能力が得られる、また必要な追い払い行為も行えるという一体型ロボットとして製品化をスタートです |
| 相手を識別してターゲットとし、かつ追尾する(PTZカメラ採用時) |
このことに関しては、完成できたと考えています
何かが通過した、現れたというような監視ポストには即使用できます、もちろん相手を識別して、です
モーションセンサや、赤外線センサによる検知とは全く別物です
タイムスタンプを押した映像の保存もできますし、インフラさえあれば、メール通知も出来ます
その場の安全管理、犯罪防止分野などへの転用も、もちろん可能です |
| 忌避(追い払い)手段としてパラメトリックスピーカーを評価する |
高額でかつ入手が困難になったという問題はありますが、その性能を野生動物の追い払いに活かしたら、という観点での評価です
指向性の鋭さから、追尾してストレスをかける…いわばストーカー行為ですが、このことについては間違いなく効果を得ることができます
単にどこからか威嚇音がするということとはまったく違った、慣れることないプレッシャーです
次に、周囲に暮らす人への影響について、窓を閉めればその方向に向けて音を出しても室内には聞こえません
通常の音波なら、窓のガラスを揺らして結果として室内でも音は聞こえますが、パラメトリックスピーカーの場合は、超音波を搬送波として使用しているため、ガラスに反射することで変調をかけている音は室内には聞こえません
このことは、住宅の近くでの設置・・・鉄道や道路などの生活インフラを守る手段としても、有効に活用できることにつながるでしょう |
| 当初の目的、獣害対策について |
現システムで、お使いになる方の希望に合わせて、トリガ信号を出すことは容易に対応できます
忌避行為に何をどう使うかということに関しては、お使いになる方主体だと考えていますが、こちらでも忌避具の効果検証の場を増やす努力をしています
製品について、ここではイメージでご紹介します
モデルは、大きくは2種類
忌避具装着、あるいは外部の忌避具を制御できるモデル
・想定している忌避具は
1.バイオBB弾 その他威嚇用粉末や強力な水流を発するもの
2.パラメトリック・スピーカー
3.レーザー光
カメラの選択で100°〜360°の監視が可能で、検知した方位情報も取り出せます
安価な固定カメラを採用する場合、例えば電子花火の採用も有効に思われます(検知位置に合わせて点火)
モニタリングポスト、あるいは出没監視目的向けモデル
このモデルは、忌避具を装着しません
検知、通知、画像保存を目的とします |
| 忌避具(バイオBB弾・レーザー光・パラメトリックスピーカー)を装着した偽装モデルまで考えました |
 |
 |
偽装して、こんな案山子にも
オレンジのウィンドブレーカーを着せれば、より野生にとって目立ちます |
|
|
|
| 忌避具を取り付けての効果の検証から、一つの結論 |
先にも映像等でご紹介していますが、地元での実証で、パラメトリック・スピーカーによる銃撃音で目標を追いかけることを行った結果について、
短期的には効果抜群でしたが、長期的にはやはり慣れてくることで、最後は無視されるようになりました、敵もさるものです(赤外線投光器が自分の方に向いた時には、そこはカメラ目線をします)
そこで光源(グリーンLED)を用意して、照らすということを併用したのが北海道下川町での実証実験です
要は、お前を狙っているのだぞ、ということを強く知らしめることについて補助具の採用です
一般に、音や光などの刺激は、象徴的な脅威とはなり得ても、その後に実質的な脅威(痛みや死)を与えない限り、慣れてしまうのではないかと考えられています
北海道下川町での実証実験では、自身が「狙われている」という雰囲気を、はたして野生動物側にどう意識され、行動に影響を及ぼすのか、その効果がいくらかでも明らかにできたように思います
より確実なのは、補助具としてグリーンレーザー光だと考えるところですが、安全面から色々と周囲から言われますので、現時点では強力なLEDライトの採用です |